核心优势
- 最先进的畸变校准算法。
- 借助快速直观的独立工具实现最佳对焦和校准性能。
- 能够最大限度地提高系统性能,从而实现最佳测量效果。
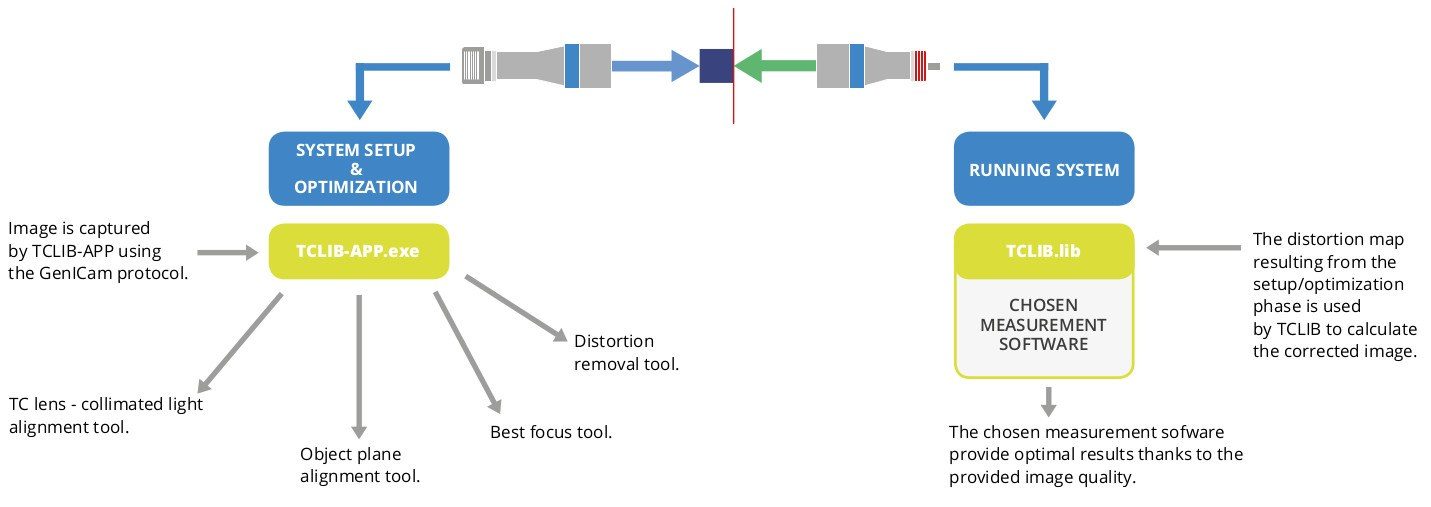
TCLIB Suite 是一款基于 C++ 的计算机视觉软件,专用于优化远心装置的光学性能,通常用于测量。借助 .dll 库和专用独立工具,TCLIB 可轻松处理典型远心装置(对焦、校准和畸变校准)的各个方面,如处理不当,可能会对测量结果产生负面影响。
TCLIB Suite 有助于提高系统质量,为您选择的计量软件提供最佳图像,从而获得可以达到的最佳测量结果。事实上,如果图像经过良好校准,实现均匀背光且无畸变,则任何边缘检测、图案匹配和校准软件将会变得更加准确和可靠。
| 备注: (1) 许可证可通过以下两种方式激活:
重要提示:通过 Machine ID 激活的许可证将永久绑定到对应的设备。若设备损坏或丢失,许可证将无法恢复,需重新购买。Opto Engineering 强烈建议使用 USB 加密狗,以确保最大的可移植性和可恢复性 (2) 仅可与 360LIB‑02 配套使用。 |
||||
产品型号 |
名称 | 类别 | 永久 | 许可证分发 |
|---|---|---|---|---|
| TCLIB-02 | 用于远心装置优化的软件库和独立工具 | 软件许可 | 是 | USB 加密狗或机器 ID(Machine ID) (1) |
| USB-DONGLE-TC (2) | TCLIB‑02 的 USB 加密狗 | 硬件 | - | - |
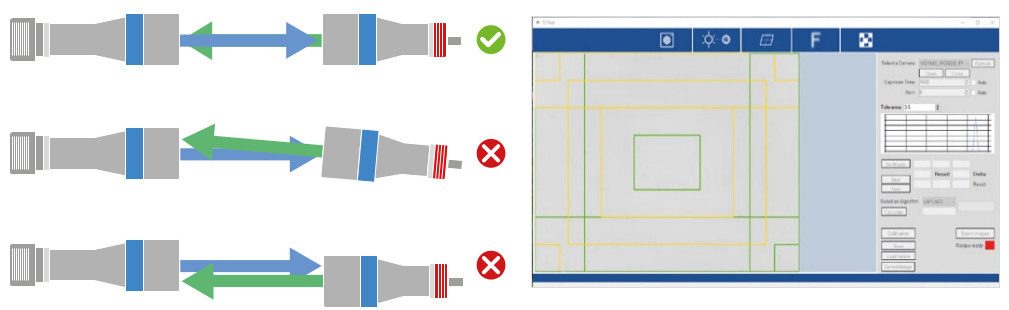
镜头和平行光源的校准
该工具有助于操作员在最大程度上获得均匀照明。
获得最佳照明均匀性是打造优质测量系统的第一个基本步骤,因为,此规范将影响任何一组边缘检测算法的可靠性。
此工具在实时模式下工作,可提供有关校准的视觉反馈。视场分为多个感兴趣区域 (ROI),每个 ROI 都具有关于校准的彩色反馈:
- 红色:不均匀
- 黄色:离散均匀性
- 绿色:良好均匀性
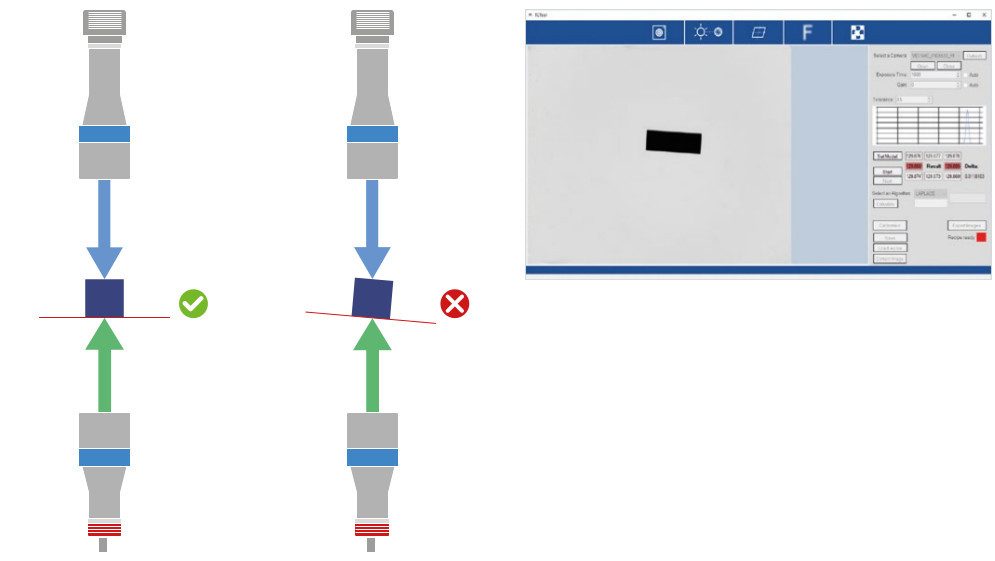
校准物体平面
实现物体平面与光轴的良好对准至关重要。未对准的后果是:
- 在逆光条件下,我们看到的是物体投影,而非其实际轮廓。因此,图像可能因某些方向上的压缩而受到影响。
- 某些特征可能不会同时处于最佳焦点位置,从而影响测量边缘的质量。
最佳焦点
此工具为每个图像提供数字索引,用于指示与最佳焦点的接近程度。

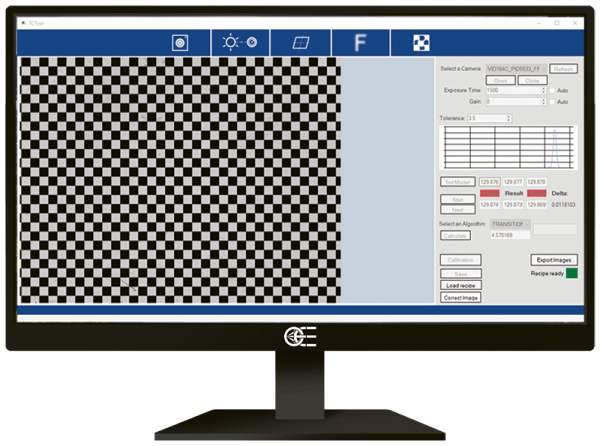
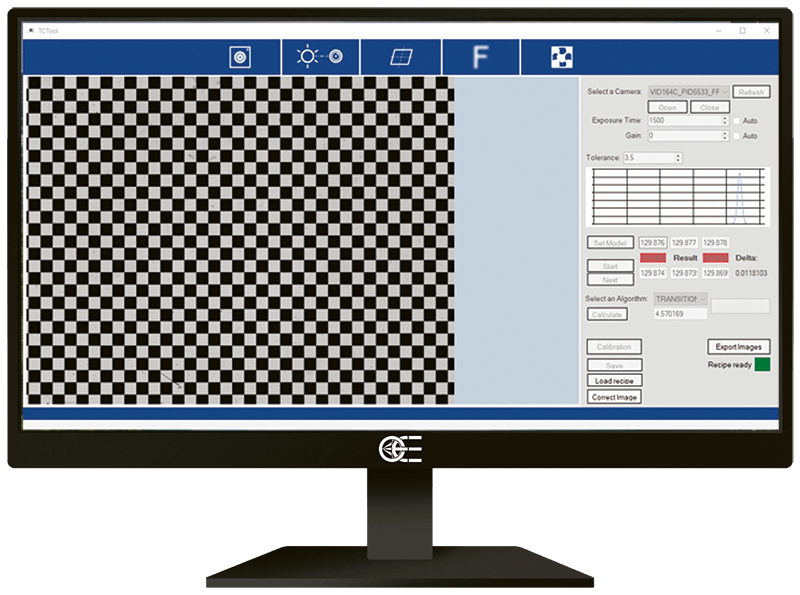
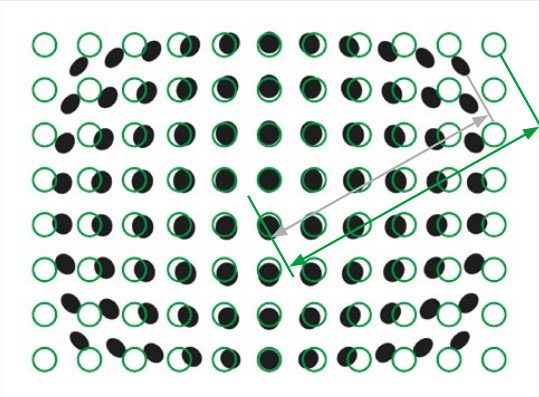
畸变校正
此工具可用于消除远心镜头的残余光学畸变 — 无论多么小,此值必须尽可能接近于零,才能达到最佳效果。从覆盖整个视场(例如 Opto Engineering® PT 系列)的棋盘格标定板的单一图片中,我们可以获得消除畸变所需的全部信息。
程序步骤如下:
- 获取校准标定板的单一图像(脱机)
- 根据此图片创建畸变图(脱机)
- 畸变图保存在参考文件中
- 消除每个新获取的图像的畸变,调用已保存的畸变图(在线)
步骤 1 和步骤 2 旨在校准系统,因此只需执行一次。但是,需要对获取的每个新图像重复步骤 4。所有这些功能都集成在 library .dll 文件和独立演示软件中。演示应用程序可用于测试或获取畸变图,而对于实际联机校正,建议使用集成 .dll 文件。
优化的远心系统的结果.
我们测试了使用TCLIB Suite优化不同远心系统的结果。结果涉及套件的四个工具,如下所示:
- 根据照明的均匀性(平均灰度的标准偏差)给出的镜头-光源校准
- 以度数表示的最小值的镜头-被测物体的平面对准
- 以精确到mm表示工作距离的焦距精度
- 基于5 mm量块20次重复性测量结果的畸变校准
| TCCP3MHR144-C + LTCLCP144-G + PTCP-S1-HR1-C + ITA120-GM-10C | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Field of View | LENS-LIGHT ALIGNMENT as BACKGROUND HOMOGENEITY | OBJECT PLANE ALIGNMENT as BEST (LOWEST) ANGLE BETWEEN PLANES | BEST FOCUS as BEST (LOWEST) UNCERTAINTY ON WD | DISTORTION CALIBRATION as RESULT OF 20 REPEATED MEASUREMENTS | ||||||||||
| 164x120 mm | 4% | 0.012° | +/- 0.5 mm |
| ||||||||||
| TC3MHR144-C + LTCL144-G + PT120-240 (legacy) + ITA120-GM-10C | ||||||||||||||
| Field of View | LENS-LIGHT ALIGNMENT as BACKGROUND HOMOGENEITY | OBJECT PLANE ALIGNMENT as BEST (LOWEST) ANGLE BETWEEN PLANES | BEST FOCUS as BEST (LOWEST) UNCERTAINTY ON WD | DISTORTION CALIBRATION as RESULT OF 20 REPEATED MEASUREMENTS | ||||||||||
| 141x104 mm | 3% | 0.014° | +/- 0.5 mm |
| ||||||||||
| TC3MHR144-C + LTCL144-G + PTCP-S1-HR1-C + ITA120-GM-10C | ||||||||||||||
| Field of View | LENS-LIGHT ALIGNMENT as BACKGROUND HOMOGENEITY | OBJECT PLANE ALIGNMENT as BEST (LOWEST) ANGLE BETWEEN PLANES | BEST FOCUS as BEST (LOWEST) UNCERTAINTY ON WD | DISTORTION CALIBRATION as RESULT OF 20 REPEATED MEASUREMENTS | ||||||||||
| 141x104 mm | 3% | 0.003° | +/- 0.5 mm |
| ||||||||||
| TCCR3M064-C + LTCLCR064-G + PT064-096 + ITA120-GM-10C | ||||||||||||||
| Field of View | LENS-LIGHT ALIGNMENT as BACKGROUND HOMOGENEITY | OBJECT PLANE ALIGNMENT as BEST (LOWEST) ANGLE BETWEEN PLANES | BEST FOCUS as BEST (LOWEST) UNCERTAINTY ON WD | DISTORTION CALIBRATION as RESULT OF 20 REPEATED MEASUREMENTS | ||||||||||
| 62x46 mm | 3% | 0.001° | +/- 0.5 mm |
| ||||||||||
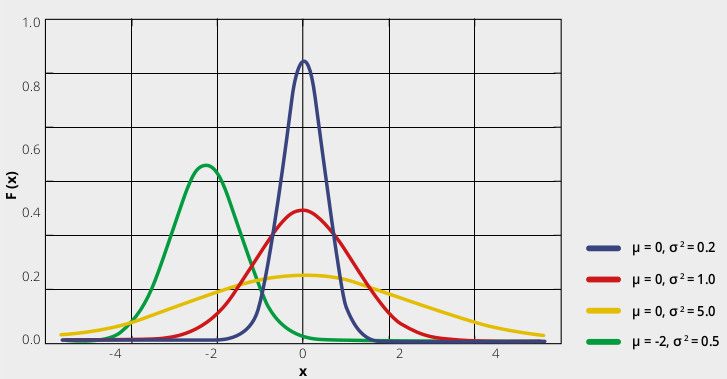
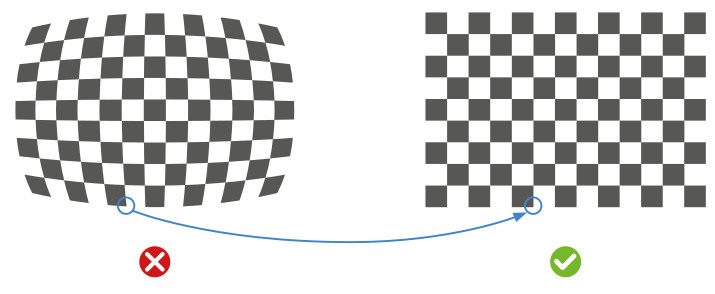
何为畸变校正?
每次我们使用光学系统(即镜头和匹配的相机)时,我们都必须面对畸变这一问题。系统的光学畸变可以定义为偏差,该偏差使得一组点在不同于实际位置的相对位置成像。
一个典型的例子就是直线由于镜头畸变而形成弯曲成像。图 1 显示了校准标定板上的畸变效果。
很难对与原始无畸变视场与畸变图像相连接的数学变换进行建模,同时,应考虑到它可以通过视场本身发生很大变化。畸变对计量的首要影响便是测量的可重复性降低:发生畸变时,根据物体在视场中所处位置的不同,物体特征“看起来”会略有不同,因此,每次将物体移除再重新放回时,该特征的测量值都有可能发生变化。